

Fabriquer son Traceur Marine pour Pas Cher : Une Alternative DIY avec OpenPlotter
Dans l’univers de la navigation maritime, les traceurs marins (ou chart plotter) sont des équipements indispensables pour les plaisanciers et navigateurs aguerris. Cependant, les systèmes propriétaires du marché sont souvent très onéreux. Pour contrer cela, un projet de fabrication de traceur marine à partir de solutions open source comme OpenPlotter se présente comme une option économique, flexible, et personnalisable, adaptée à vos besoins spécifiques. Si vous êtes un passionné de navigation à la voile, avec quelques compétences techniques, ce projet peut vous aider à concevoir votre propre traceur pour un coût plus de dix fois inférieur aux solutions propriétaire.
1. Objectif de l’expérience
L’idée est de fabriquer une plateforme Chart Plotter, qui intègre plusieurs fonctionnalités marines essentielles :
- Gestion des capteurs marins : GPS, AIS (système d’identification automatique), sondeur, anémomètre, girouette, et pilote automatique.
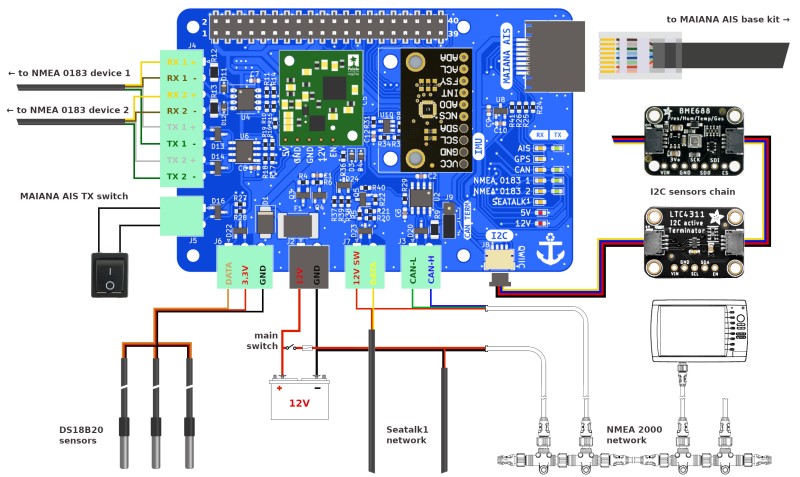
- Compatibilité avec le bus NMEA2000 : grâce à la carte MacArthur qui permet la communication entre ces différents instruments.
- Économie de coût : Le projet vise à rester dans un budget de 300 à 500 euros, bien en deçà des solutions traditionnelles sur le marché.
2. Pourquoi OpenPlotter ?
OpenPlotter est une plateforme open-source conçue pour être utilisée avec des nano-ordinateurs comme le Raspberry Pi. Elle est spécialement dédiée aux applications maritimes, offrant une suite d’outils de navigation tels que le suivi GPS, l’AIS (système d’identification automatique des navires), la gestion des capteurs NMEA2000, et bien plus encore. Le tout sans nécessiter l’achat de matériel propriétaire coûteux.
Avantages :
- Économique : Vous pouvez réaliser votre propre traceur pour un budget de 300 à 500 euros.
- Personnalisable : La solution peut être adaptée à vos besoins et au type d’équipement de votre voilier.
- Flexible : OpenPlotter prend en charge une large gamme de capteurs et d’équipements marins, permettant une intégration facile avec les systèmes NMEA2000.
Le protocole réseau NMEA a été développé dans les années 80 par la National Marine Electronics Association, avec pour objectif de créer un système de transmission de données entre des appareils de types différents et conçus par des constructeurs variés. Avec ce protocole, les données de GPS, de vent, de profondeur, d’AIS, de vitesse, du moteur et du compas peuvent être échangées entre, par exemple, des appareils Simrad, Garmin et Raymarine. Pour ce faire, une interface NMEA2000 est requise. Les images, telles que celles du radar ou provenant du sondeur de pêche, ainsi que les éléments de cartographie, ne peuvent pas être transmises via le protocole NMEA2000.
Le protocole NMEA0180 a été la première norme en vigueur dans les années 80 et au cours des années suivantes, il a été amélioré pour aboutir au protocole NMEA0183. Depuis lors, c’est le protocole NMEA2000 qui lui a succédé et est devenu la norme pour les réseaux embarqués, et qui est utilisé pour beaucoup des appareils utilisés. Dans un réseau NMEA2000, les données sont transmises via un Bus CAN (Controller Area Network). Le Bus de données CAN simplifie l’installation et transmet les données à tous les appareils du réseau. Parmi les appareils NMEA2000 standards, on trouve des capteurs de vent, des antennes GPS, des appareils AIS, des capteurs de profondeur et de vitesse, des écrans multifonctions, des instruments, ainsi que des pilotes automatiques.
Le NMEA2000 est aussi connu sous le nom de N2K. De plus, le système comporte des variantes avec des noms spécifiques selon les marques, comme, par exemple, SeaTalkNG (Raymarine) ou Simnet (Simrad).
3. Matériel Nécessaire
Pour ce projet, voici les composants clés à réunir (Je m’en charge) :
- Raspberry Pi 4 : C’est le cerveau du système, capable de traiter toutes les données issues des capteurs marins. Son faible coût et sa flexibilité en font un choix parfait.
- Disque SSD : Pour stocker rapidement et de manière fiable les données de navigation.
- Écran tactile : Pour une interface utilisateur facile et intuitive, même en conditions difficiles en mer.
- Carte MacArthur (Hat + module IMU et Power) : Ce module permet de connecter les capteurs GPS, AIS, sondeur, anémomètre, girouette, et pilote automatique au bus NMEA2000.
4. Expérimentation et partenariat
Pour tester et valider cette solution, je recherche un voilier expérimental. Idéalement, ce voilier serait équipé d’une instrumentation électronique dense (système NMEA2000) pour permettre une intégration complète des capteurs et instruments de navigation. Mon souhait serait de tester ce dispositif en conditions réelles, sur un voilier dans l’Hérault, pour bénéficier d’un retour terrain pertinent et immédiat.
5. Appel aux propriétaires de voilier
Je lance donc un appel aux propriétaires de voiliers possédant ce type d’équipement, pour collaborer sur cette phase d’expérimentation. Si vous êtes basés dans l’Hérault ou à proximité, et que vous souhaitez participer à l’intégration d’une solution open source et accessible pour les passionnés de voile, votre aide serait précieuse.


